CM4_PWM使用参考
REVISION HISTORY¶
| Revision No. | Description |
Date |
|---|---|---|
| 1.0 | 05/31/2024 |
1. 概述¶
PWM (Pulse Width Modulation) 模块用于产生脉宽波形,可通过改变频率和占空比来改变输出的电流、电压进而实现控制电机转速、液晶屏调光等功能。
2. 功能描述¶
-
支持PWM的channel数量为4个
-
channel 0~3支持的OSCCLK(Hz)为:12M;
-
频率的工作范围是(OSCCLK/2)到(OSCCLK/2^34) ,例如OSCCLK = 12MHz,则范围是(0.0007Hz~6MHz);
-
支持double buffer来防止产生错误波形,即波形会等待当前波形完全生成之后更新;
3. 相关概念说明¶
3.1. 频率和占空比¶
-
频率(frequency)
每秒钟信号从高电平到低电平再回到高电平的次数。
-
占空比(duty cycle)
高电平持续时间和低电平持续时间之间的比例。
-
举例说明
假设PWM的OSCCLK频率为12M,那么可设置的频率范围为:0.0007Hz~6MHz;
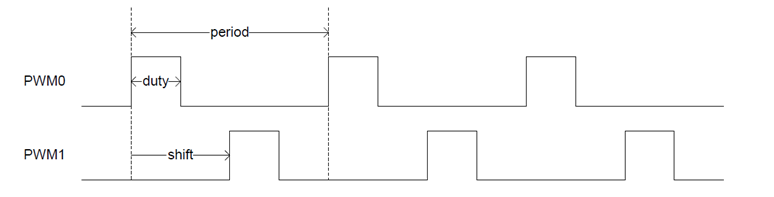
设定PWM0和PWM1为频率120Hz,占空比25%的波形,且PWM1相对于PWM0有180°的相位偏移,那么各参数配置如下:
period duty shift PWM0 120Hz 25% 0% PWM1 120Hz 75% 50% 产生的波形如下图:
3.2. 普通精度模式¶
rtos config中不开启Support high precision calculation,则使用普通精度模式,该模式下配置PWM的period的单位为Hz,duty cycle的单位为百分比。
假设要设置PWM0频率为10000HZ,占空比为50%,则:
period = 10000
duty cycle = 50
3.3. 高精度模式¶
rtos config中开启Support high precision calculation选项时,则使用高精度模式,该模式下配置PWM的period和duty_cycle均使用纳秒为单位,所以要先计算周期和占空比的值。
假设要设置PWM0频率为10000.5HZ,占空比为49.5%,则:
period = 10^9 ÷ 10000.5 = 99995
duty cycle = 99995 * 49.5% = 49498
由此可见,高精度模式的优势在于参数设定支持到小数。
4. CM4用法介绍¶
4.1 DRIVER PATH¶
sc/driver/sysdriver/pwm/drv/pub/drv_pwm.h sc/driver/sysdriver/pwm/drv/src/drv_pwm.c sc/driver/sysdriver/pwm/drv/src/drv_pwm_test.c sc/driver/sysdriver/pwm/hal/chipname/src/hal_pwm.c sc/driver/sysdriver/pwm/hal/chipname/inc/hal_pwm.h sc/driver/sysdriver/pwm/hal/chipname/inc/hal_pwm_cfg.h
4.2. CONFIG配置¶
config文件位于mak/options_chipname_cm4_isw.mak
# Feature_Name = [DRV] PWM driver support # Description = PWM driver support # Option_Selection = TRUE, FALSE CONFIG_PWM_SUPPORT = TRUE //使能PWM驱动 CONFIG_SSTAR_PWM_EXTEND = TRUE //TRUE:高精度模式,FALSE:低精度模式
4.3 SYSDESC配置¶
chipname_xxx.sys文件是用于描述外设硬件属性的文件,外设节点中包含的属性值可用于外设的配置,类似Linux的设备树,该文件位于sc/driver/sysdriver/sysdesc/hal/chipname/pub:
<pm_pwm0> [reg_u32_u16] 0x40003400 0x37; [status_u8] 1; <pm_pwm1> [reg_u32_u16] 0x40003440 0x37; [status_u8] 1; <pm_pwm2> [reg_u32_u16] 0x40003480 0x37; [status_u8] 1; <pm_pwm3> [reg_u32_u16] 0x400034C0 0x37; [status_u8] 1;
pwm驱动中支持配置的属性如下表:
| 属性 | 描述 | 设定值 | 备注 |
|---|---|---|---|
| reg_u32_u16 | 指定pwm bank地址 | 参考上文 | 禁止修改 |
| status_u8 | 选择是否使能驱动 | 1:enable;0:disable | 可根据需要修改 |
4.4 PADMUX配置¶
CONFIG配置:CONFIG_PADMUX_SUPPORT=TRUE
如果chipname_xxx.sys文件配置了属性<padmux>,那么PADMUX的设定直接在此配置:
<padmux>
[schematic_u32_u32_u32]
PAD_PM_PWM0 PINMUX_FOR_PM_PWM0_MODE_1 MDRV_PUSE_PWM0,
PAD_PM_PWM1 PINMUX_FOR_PM_PWM1_MODE_1 MDRV_PUSE_PWM1,
PAD_PM_PWM2 PINMUX_FOR_PM_PWM2_MODE_1 MDRV_PUSE_PWM2,
PAD_PM_PWM3 PINMUX_FOR_PM_PWM3_MODE_1 MDRV_PUSE_PWM3;
[status_u8] 1;
否则通过使能PADMUX驱动,在chipname-xxx-padmux.c文件配置引脚复用功能,该文件位于sc/driver/sysdriver/padmux/hal/chipname/src,只需要在对应的schematic属性添加如下内容中设定:
pad_info_t schematic[] =
{
{PAD_PM_PWM0 PINMUX_FOR_PM_PWM0_MODE_1 MDRV_PUSE_PWM0},
{PAD_PM_PWM1 PINMUX_FOR_PM_PWM1_MODE_1 MDRV_PUSE_PWM1},
{PAD_PM_PWM2 PINMUX_FOR_PM_PWM2_MODE_1 MDRV_PUSE_PWM2},
{PAD_PM_PWM3 PINMUX_FOR_PM_PWM3_MODE_1 MDRV_PUSE_PWM3},
};
第一列为引脚索引号,可以在sc/drivers/sysdriver/gpio/hal/chipname/pub/gpio.h中查询;
第二列为模式定义,可以在sc/drivers/sysdriver/gpio/hal/chipname/pub/padmux.h中查询;
第三列为引脚及搭配模式的索引名称,可以在sc/drivers/sysdriver/padmux/drv/pub/drv_puse.h中查询;
各PWM硬件组padmux罗列
| PWM CHANNEL | register addr | padmod | PAD | PIN_NAME |
|---|---|---|---|---|
| PWM0 | bank 3fH offset 51H bit[2:0] | 1 | PAD_PM_PWM0 | PM_PWM0 |
| 2 | PAD_PM_GPIO0 | PM_GPIO0 | ||
| 4 | PAD_PM_PSPI0_DI | PM_PSPI0_DI | ||
| 5 | PAD_PM_GPIO12 | PM_GPIO12 | ||
| PWM1 | bank 3fH offset 51H bit[6:4] | 1 | PAD_PM_PWM1 | PM_PWM1 |
| 2 | PAD_PM_GPIO1 | PM_GPIO1 | ||
| 3 | PAD_PM_PSPI0_DO | PM_PSPI0_DO | ||
| 4 | PAD_PM_GPIO11 | PM_GPIO11 | ||
| PWM2 | bank 3fH offset 51H bit[10:8] | 1 | PAD_PM_PWM2 | PM_PWM2 |
| 2 | PAD_PM_PSPI0_CZ | PM_PSPI0_CZ | ||
| 3 | PAD_PM_GPIO9 | PM_GPIO9 | ||
| 4 | PAD_PM_I2C_CLK | PM_I2C_CLK | ||
| PWM3 | bank 3fH offset 51H bit[14:12] | 1 | PAD_PM_PWM3 | PM_PWM2 |
| 2 | PAD_PM_I2C_SDA | PM_I2C_SDA | ||
| 3 | PAD_PM_GPIO10 | PM_GPIO10 | ||
| 4 | PAD_PM_PSPI0_CK | PM_PSPI0_CK |
4.5 API说明¶
头文件位于sc/driver/sysdriver/pwm/drv/pub/drv_pwm.h
struct pwm_ch_cfg
{
u64 duty; //设定占空比,实际占空比=duty-shift
u64 shift; //设定起始相位
u64 period; //设定周期
u32 polarity; //极性设置:0-正常,1-极性取反
u32 channel; //指定channel
};
extern int drv_pwm_set_period(u32 channel, u64 period, u8 sync);
extern int drv_pwm_set_duty(u32 channel, u64 duty, u8 sync);
extern int drv_pwm_set_shift(u32 channel, u64 shift, u8 sync);
extern int drv_pwm_set_polarity(u32 channel, u64 polar, u8 sync);
extern int drv_pwm_channel_config(struct pwm_ch_cfg *pwm_ch);
extern int drv_pwm_channel_enable(u32 channel, u8 enable);
4.5.1. drv_pwm_set_period¶
-
目的
设置pwm周期。
-
语法
int drv_pwm_set_period(struct pwm_ch_cfg *pwm_ch, u8 sync);
-
参数
参数名称 描述 pwm_ch 用于配置pwm的通道和周期信息 sync 1表示配置在此次接口调用后生效,0表示此次接口调用后不生效,生效需要调用drv_pwm_update_enable接口 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.2. drv_pwm_set_duty¶
-
目的
设置pwm占空比。
-
语法
int drv_pwm_set_duty(struct pwm_ch_cfg *pwm_ch, u8 sync);
-
参数
参数名称 描述 pwm_ch 用于配置pwm的通道和占空比信息 sync 1表示配置在此次接口调用后生效,0表示此次接口调用后不生效,生效需要调用drv_pwm_update_enable接口 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.3. drv_pwm_set_shift¶
-
目的
设置pwm相位偏移。
-
语法
int drv_pwm_set_shift(struct pwm_ch_cfg *pwm_ch, u8 sync);
-
参数
参数名称 描述 pwm_ch 用于配置pwm的通道和相位偏移信息 sync 1表示配置在此次接口调用后生效,0表示此次接口调用后不生效,生效需要调用drv_pwm_update_enable接口 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.4. drv_pwm_set_polarity¶
-
目的
设置pwm极性。
-
语法
int drv_pwm_set_polarity(struct pwm_ch_cfg *pwm_ch, u8 sync);
-
参数
参数名称 描述 pwm_ch 用于配置pwm的通道和极性信息 sync 1表示配置在此次接口调用后生效,0表示此次接口调用后不生效,生效需要调用drv_pwm_update_enable接口 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.5. drv_pwm_channel_config¶
-
目的
设置pwm配置。
-
语法
int drv_pwm_channel_config(struct pwm_ch_cfg *pwm_ch);
-
参数
参数名称 描述 pwm_ch 用于配置pwm的通道、周期、占空比、相位偏移和极性信息 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.6. drv_pwm_channel_enable¶
-
目的
使能pwm配置。
-
语法
int drv_pwm_channel_enable(u32 channel, u8 enable);
-
参数
参数名称 描述 channel 用于配置pwm的通道信息 enable 1表示使能,0表示失能 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.6 DEMO¶
demo源码位于sc/driver/sysdriver/pwm/drv/src/drv_pwm_test.c
5. DEBUG方法¶
5.1 PWM device不存在¶
-
检查chipname.sys PWM节点的
status是否为1 -
检查config是否配置,详见4.2. CONFIG配置
5.2 配置后PWM无波形产生¶
Step1:首先确认测量的引脚是否正确:打开对应的原理图确认即可,如果没有错误的话,则进行下一步。
Step2:确认对应的PWM mode是否生效,引脚复用失败主要有两个原因:
原因一:该引脚没有设置为PWM mode,设置方法详见4.4 PADMUX配置
原因二:有优先级比PWM mode更高级别的padmux mode被开启
Step3:检查pwm相关参数是否设置成功