Sigmastar_GPIO使用参考
REVISION HISTORY¶
| Revision No. | Description |
Date |
|---|---|---|
| 1.0 | 04/15/2024 |
1. 概述¶
General Purpose Input Output (通用输入/输出)简称为GPIO。GPIO 采用标准的LINUX框架,能够使用统一的接口来操作gpio。

GPIO的框架如上图,中间层是 gpiolib,用于管理系统中的 GPIO。gpiolib 汇总了 GPIO 的通用操作,根据 GPIO 的特性,gpiolib 对上(其他 Drivers)提供的一套统一通用的操作 GPIO 的软件接口。对下,Gpiolib 提供了针对不同芯片操作的一套 framework,针对不同芯片,只需要实现drv_gpio_io.c,然后使用 Gpiolib 提供的注册函数,将其挂接到 Gpiolib 上。
2. 关键字说明¶
2.1. GPIO Index¶
原理图上GPIO的Pad name可以在表1-1中查找到对应的GPIO Index,GPIO Index作为软件操作GPIO相关函数的输入参数使用。
例如:希望操作的GPIO为 PAD_SPI0_DO,根据表1-1中的内容找到对应的GPIO Index为12。
表1-1:GPIO Index与PAD对应表
| Pad Name | GPIO Index | Pad Name | GPIO Index | Pad Name | GPIO Index |
|---|---|---|---|---|---|
| PAD_SD1_IO1 | 0 | PAD_SD1_IO0 | 1 | PAD_SD1_IO5 | 2 |
| PAD_SD1_IO4 | 3 | PAD_SD1_IO3 | 4 | PAD_SD1_IO2 | 5 |
| PAD_SD1_IO6 | 6 | PAD_UART1_RX | 7 | PAD_UART1_TX | 8 |
| PAD_SPI0_CZ | 9 | PAD_SPI0_CK | 10 | PAD_SPI0_DI | 11 |
| PAD_SPI0_DO | 12 | PAD_PWM0 | 13 | PAD_PWM1 | 14 |
| PAD_SD_CLK | 15 | PAD_SD_CMD | 16 | PAD_SD_D0 | 17 |
| PAD_SD_D1 | 18 | PAD_SD_D2 | 19 | PAD_SD_D3 | 20 |
| PAD_USB_CID | 21 | PAD_PM_SD_CDZ | 22 | PAD_PM_IRIN | 23 |
| PAD_PM_UART_RX | 24 | PAD_PM_UART_TX | 25 | PAD_PM_GPIO0 | 26 |
| PAD_PM_GPIO1 | 27 | PAD_PM_GPIO2 | 28 | PAD_PM_GPIO3 | 29 |
| PAD_PM_GPIO4 | 30 | PAD_PM_GPIO7 | 31 | PAD_PM_GPIO8 | 32 |
| PAD_PM_GPIO9 | 33 | PAD_PM_SPI_CZ | 34 | PAD_PM_SPI_DI | 35 |
| PAD_PM_SPI_WPZ | 36 | PAD_PM_SPI_DO | 37 | PAD_PM_SPI_CK | 38 |
| PAD_PM_SPI_HLD | 39 | PAD_PM_LED0 | 40 | PAD_PM_LED1 | 41 |
| PAD_FUART_RX | 42 | PAD_FUART_TX | 43 | PAD_FUART_CTS | 44 |
| PAD_FUART_RTS | 45 | PAD_GPIO0 | 46 | PAD_GPIO1 | 47 |
| PAD_GPIO2 | 48 | PAD_GPIO3 | 49 | PAD_GPIO4 | 50 |
| PAD_GPIO5 | 51 | PAD_GPIO6 | 52 | PAD_GPIO7 | 53 |
| PAD_GPIO14 | 54 | PAD_GPIO15 | 55 | PAD_I2C0_SCL | 56 |
| PAD_I2C0_SDA | 57 | PAD_I2C1_SCL | 58 | PAD_I2C1_SDA | 59 |
| PAD_SR_IO00 | 60 | PAD_SR_IO01 | 61 | PAD_SR_IO02 | 62 |
| PAD_SR_IO03 | 63 | PAD_SR_IO04 | 64 | PAD_SR_IO05 | 65 |
| PAD_SR_IO06 | 66 | PAD_SR_IO07 | 67 | PAD_SR_IO08 | 68 |
| PAD_SR_IO09 | 69 | PAD_SR_IO10 | 70 | PAD_SR_IO11 | 71 |
| PAD_SR_IO12 | 72 | PAD_SR_IO13 | 73 | PAD_SR_IO14 | 74 |
| PAD_SR_IO15 | 75 | PAD_SR_IO16 | 76 | PAD_SR_IO17 | 77 |
| PAD_SAR_GPIO3 | 78 | PAD_SAR_GPIO2 | 79 | PAD_SAR_GPIO1 | 80 |
| PAD_SAR_GPIO0 | 81 |
3. Uboot用法介绍¶
3.1. Uboot config配置说明¶
[*] SigmaStar drivers --->
[*] SigmaStar GPIO
[*] SigmaStar padmux
3.2. Dts参数配置说明¶
gpio: gpio {
compatible = "sstar,gpio";
status = "okay";
};
| 属性 | 描述 | 备注 |
|---|---|---|
| compatible | 用于匹配驱动进行驱动注册 | 禁止修改 |
| status | 驱动开关 | 根据需要配置,ok/disabled |
3.3. Uboot cmd参数说明¶
<input|set|clear|toggle> <pin> → input/set/clear/toggle the specified pin
gpio status [-a] [<bank> | <pin>] → show [all / claimed] GPIOs
| cmd | 参数 | 说明 |
|---|---|---|
| input | pin | 设置引脚号为pin的引脚为gpio input mode |
| set | pin | 设置引脚号为pin的引脚为gpio output high mode |
| clear | pin | 设置引脚号为pin的引脚为gpio output low mode |
| toggle | pin | 将引脚号为pin的引脚电平翻转 |
| status | pin | 查看引脚号为pin的引脚的状态 |
3.4. Uboot cmd使用实例¶
gpio input <gpio#> → gpio input 69 // gpio69 set as input
gpio set <gpio#> → gpio set 10 // gpio10 set as output high
gpio clear <gpio#> → gpio clear 49 // gpio49 set as output low
gpio toggle <gpio#> → gpio toggle 49 // gpio49 level toggle
gpio status <gpio#> → gpio status 20 // gpio20 status
4. Kernel用法介绍¶
4.1. Kernel config配置说明¶
Device Drivers --->
[*] GPIO Support --->
[*] /sys/class/gpio/... (sysfs interface)
[*] SStar SoC platform drivers --->
[*] GPIO driver
[*] PADMUX driver
4.2. Dts参数配置说明¶
gpio: gpio {
compatible = "sstar,gpio";
#gpio-cells = <2>;
status = "okay";
};
| 属性 | 描述 | 备注 |
|---|---|---|
| compatible | 用于匹配驱动进行驱动注册 | 禁止修改 |
| #gpio-cells | 声明设备节点gpio cells的个数 | 配置为2表示第一个cell为gpio号,第二个cell表示gpio有效电平 |
| status | 驱动开关 | 根据需要配置,ok/disabled |
4.3. Userspace命令使用说明¶
4.3.1. export/unexport文件接口¶
Userspace可以通过sysfs接口操作GPIO
/sys/class/gpio对应的源码位于driver/gpio/gpiolib-sysfs.c
/sys/class/gpio目录下的包含export/unexport、gpioN、gpio_chipN三种文件:
| 文件名 | 读写权限 | 值 | 描述 |
|---|---|---|---|
| export | wo | GPIO Index | 在用户空间申请某个GPIO的控制权 |
| unexport | wo | GPIO Index | 在用户空间移除某个GPIO的控制权 |
| gpioN | ro | 包含具体GPIO的direction、value等信息 | |
| gpio_chipN | ro | 指代GPIO控制器 |

-
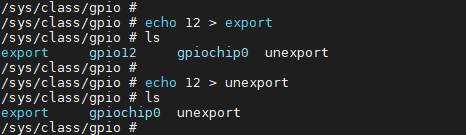
/sys/class/gpio/export 文件属性为只允许写不允许读,用户程序通过写入GPIO的编号来向内核申请将某个GPIO的控制权导出到用户空间(sysfs),前提是没有内核代码申请这个GPIO端口,如用户申请编号为12的GPIO的命令:
# echo 12 > export
上述操作会为GPIO Index为12的GPIO创建一个节点gpio12,此时/sys/class/gpio目录下边生成一个gpio12的目录,如下图所示:

-
/sys/class/gpio/unexport 文件属性也为只允许写不允许读,和export的效果相反,用户通过写入GPIO的编号来移除用户空间(sysfs)的接口。如移除gpio12文件夹的操作命令:
# echo 12 > unexport
上述操作将会移除gpio12这个节点,如下图所示:
4.3.2. /sys/class/gpio/gpioN¶
/sys/class/gpio/gpioN 指代某个具体的gpio端口,里边有如下属性文件:
| 文件名 | 读写权限 | 值 | 描述 |
| direction | rw | in | 输入模式,value不可写 |
| out | 输出模式,value可写 | ||
| high | 输出状态,默认高电平状态,value可写 | ||
| low | 输出状态,默认低电平状态,value可写 | ||
| value | rw | 1 | 高电平状态 |
| 0 | 低电平状态 | ||
| edge | rw | none | disable gpio中断 |
| rising | 使能gpio中断,并设置为上升沿触发 | ||
| falling | 使能gpio中断,并设置为下降沿触发 | ||
| both | 使能gpio中断,并设置为双边沿触发 |
direction 表示gpio端口的方向,读取结果是in或out,读取命令为:
# cat direciton
value 表示gpio引脚的电平,0表示低电平,1表示高电平;读取命令为:
# cat value
可以对direction进行写操作,命令为:
# echo in > direction

# echo out > direction
如果direction被配置为输出(out),电平默认为低,同时value是可写的,操作命令为:
# echo 1 > value # echo 0 > value

direction写入low或high时不仅可以设置为输出还可以设置指定的输出电平。操作命令为:
# echo high > direction

# echo low > direction

当然如果内核不支持或者内核代码不愿意,将不会存在这个属性,比如内核调用了gpio_export(N,0)就表示内核不愿意修改gpio端口方向属性。
edge 表示是否使能gpio中断,并设置触发模式,支持上升沿触发、下降沿触发、双边沿触发:
# cat edge
可以对edge进行写操作,命令为:
# echo none > edge # echo rising > edge # echo falling > edge # echo both > edge
如果需要使能某只脚的中断,需要先将该脚设置为输入状态,并设置触发模式,则可以调用poll(2)函数监听该中断,中断触发后poll(2)函数就会返回。
4.3.3. /sys/class/sstar/msys¶
LINUX GPIO框架暂时未支持GPIO上下拉和驱动能力调节相关配置,在LINUX的GPIO标准框架外,我们又增加了另外的文件接口用于操作GPIO的上下拉和调节驱动能力。如需支持此功能,首先需要打开 CONFIG_MSYS_GPIO 配置,该配置位于menuconfig中:
Device Drivers --->
[*] SStar SoC platform drivers --->
[*] support GPIO pull and driving modify
[*] support padmux modify and verify
/sys/class/sstar/msys对应的源代码位于driver/sstar/msys/ms_msys.c
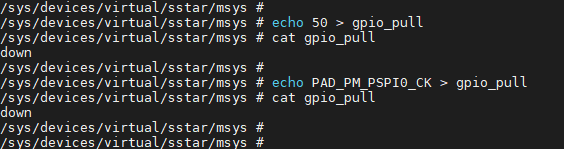
设置上拉/下拉之前需要先将GPIO设置为输入状态,输出状态上拉/下拉是没法测量的:

引脚设置为输入状态后,进入sys/class/sstar/msys文件夹:
-
gpio_pull 可以写入up和down
文件名 读写权限 值 描述 gpio_pull rw up 上拉模式 down 下拉模式 查看GPIO当前的pull 状态是pull up / pull down / pull off:
1. # echo 50 > gpio_pull 2. # cat gpio_pull
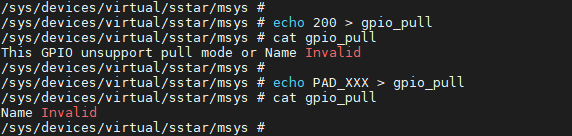
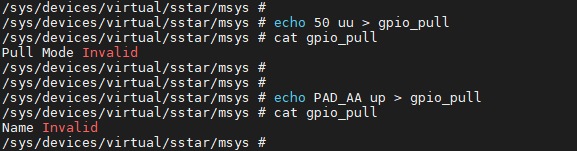
如果输入非法的GPIO Index 和GPIO Name,则会报错:
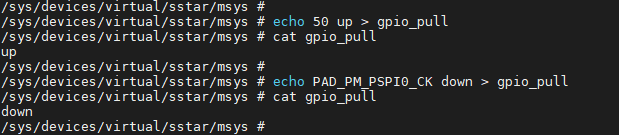
设置上拉和设置下拉的命令为:
1. # echo 50 up > gpio_pull 2. # echo 50 down > gpio_pull
设置后查看gpio_pull的状态,如下图,50表示GPIO Index,PAD_OUTN_RX0_CH3表示GPIO Name。
1. # cat gpio_pull
如果输入非法的GPIO Index 和GPIO Name,则会报错:
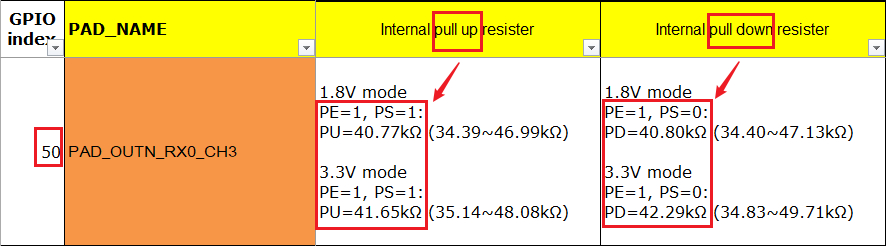
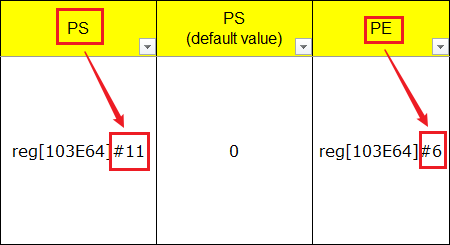
检查具体BIT是否被正确写入,可以根据GPIO_Mapping_Table,查找对应的PAD(如下图GPIO INDEX:50)。当pull up的时候PE bit位为1,PS bit位为0;pull down的时候PE bit位为1,PS bit位为0。具体操作命令为:
1. # riu_r 0x103e 0x34
查看riu_r返回值的BIT6、BIT11
-
gpio_drive 可以写入驱动的等级
文件名 读写权限 值 描述 gpio_drive rw 0~8 设置GPIO的驱动等级 当前平台中GPIO的驱动能力等级可查阅GPIO_Mapping_Table。
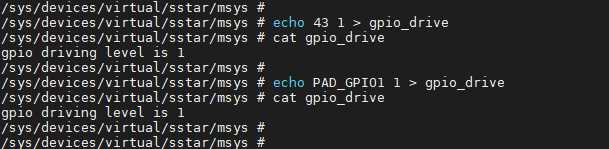
查看GPIO的初始驱动能力等级的命令位:(也可以直接使用GPIO43的名称PAD_OUTP_RX0_CH0)
1. # echo 43 > gpio_drive 2. # cat gpio_drive
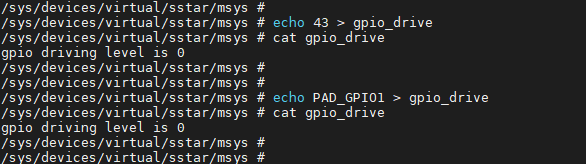
如果输入非法的GPIO Index 和GPIO Name,则会报错:

设置驱动能力之前将GPIO设置为高电平输出状态方便测量,设置命令为:
1. # echo 43 1 > gpio_drive
43为GPIO Index,1为驱动能力等级,对应4mA
设置驱动能力之后查看gpio_driver的状态,如下图,设置GPIO Index为43的引脚的驱动能力为4mA成功。
1. # cat gpio_drive
检查具体BIT是否被正确写入,可以根据GPIO_Mapping_Table,查找对应的PAD(如下图GPIO INDEX:50)。当设置驱动等级为1时,[103E56]#7 ~ #8为01。具体操作命令为:
1. # riu_r 0x103e 0x2B
查看riu_r返回值的BIT7、BIT8

-
mux_verify 用于确认复用冲突
文件名 读写权限 值 描述 mux_verify rw 0~8 确认复用功能是否冲突 以操作PAD_I2C1_SDA的PINMUX_FOR_I2C1_MODE_1为例:
1. # echo PAD_I2C1_SDA I2C1_MODE_1 > /sys/class/sstar/msys/mux_verify 2. # cat mux_verify
如下显示则表示设置正确,当前无复用冲突

如下显示则表示当前存在复用问题
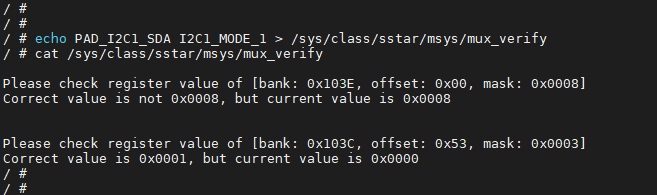
Please check register value of [bank: 0x103E, offset: 0x00, mask: 0x0008] Correct value is not 0x0008, but current value is 0x0008
有问题的寄存器地址:[bank: 0x103E, offset: 0x00, mask: 0x0008],正确的值是不为0x0008,因为mask是0x0008(BIT3==0x0008),所以BIT3要为0,但现在BIT3等于1,BIT3需要清掉
Please check register value of [bank: 0x103C, offset: 0x53, mask: 0x0003] Correct value is 0x0001, but current value is 0x0000
有问题的寄存器地址:[bank: 0x103C, offset: 0x53, mask: 0x0003],正确的值是0x0001,因为mask是0x0003(BIT1|BIT0==0x0003),所以BIT0要为1,BIT1要为0
-
mux_modify 用于配置复用功能
文件名 读写权限 值 描述 mux_modify rw 0~8 配置复用功能 以操作PAD_I2C1_SDA的PINMUX_FOR_I2C1_MODE_1为例:

4.4. 复用功能介绍¶
4.4.1. 复用功能使用说明¶
当需要使用GPIO的复用功能时候,首先需要获取所要操作的PIN脚的Name、所要复用的Tmux Mode,将他们配置在xxx-padmux.dtsi中:
1. <PAD_I2C1_SCL PINMUX_FOR_I2C1_MODE_1 MDRV_PUSE_I2C1_SCL> 2. <PAD_I2C1_SDA PINMUX_FOR_I2C1_MODE_1 MDRV_PUSE_I2C1_SDA>
如上所示,第一列和第二列分别表示Pad Name和Tmux Mode,MDRV_PUSE_XXX可以理解为当前这一组的配置的Name。
配置的时候需要注意的事项:
-
一个Pad只能配置一种Mode,不可以一个Pad同时配置多个Mode。
-
一个Puse只能对应一组配置,否则会造成冲突。
-
配置的Pad和Mode必须是匹配的。
-
不允许在驱动中直接进行复用操作,要求复用的配置都集中到xxx_padmux.dtsi。(需要动态调整复用配置的除外,目的是为了方便管理和减少配置冲突)
4.5. Sample Code¶
用户空间代码使能gpio中断请参考sstargpio_poll.c。
1. #include <stdio.h>
2. #include <stdlib.h>
3. #include <unistd.h>
4. #include <fcntl.h>
5. #include <sys/poll.h>
6.
7. int main(int argc, char *argv[])
8. {
9. char buff[1024];
10. int gpio_id;
12. struct pollfd fds[1];
13. int gpio_fd = open("/sys/class/gpio/gpio135/value", O_RDONLY);
14. if (gpio_fd == -1)
15. {printf("gpio open\n");}
16. else
17. {printf("/sys/class/gpio/gpio135/value\n");}
18. fds[0].fd = gpio_fd;
19. fds[0].events = POLLPRI;
20. int ret = read(gpio_fd, buff, 10);
21. if (ret == -1)
22. printf("read fail\n");
23. else
24. printf("read\n");
25. while (1)
26. {
27. printf("revents is %d\n", fds[0].revents);
28. ret = poll(fds, 1, -1);
29. if (ret == -1)
30. printf("poll\n");
31.
32. if (fds[0].revents & POLLPRI)
33. {
34. ret = lseek(gpio_fd, 0, SEEK_SET);
35. if (ret == -1)
36. printf("lseek\n");
37. ret = read(gpio_fd, buff, 10);
38. if (ret == -1)
39. printf("read\n");
40. printf("get interrupt\n");
41. }
42. }
43. }
5. API参考¶
5.1. 申请gpio端口¶
-
目的
创建端口为GPIO。
-
语法
int gpio_request(unsigned gpio, const char *label)
-
参数
参数名称 描述 gpio GPIO Index label 具体名称 -
返回值
返回值 描述 0 成功 other 失败
5.2. 释放gpio端口¶
-
目的
释放GPIO端口。
-
语法
void gpio_free(unsigned gpio)
-
参数
参数名称 描述 gpio GPIO Index -
返回值
返回值 描述 void 无
5.3. 设为输入¶
-
目的
标记gpio为输入。
-
语法
int gpio_direction_input(unsigned gpio);
-
参数
参数名称 描述 gpio GPIO Index -
返回值
返回值 描述 0 成功 other 失败
5.4. 设为输出¶
-
目的
标记gpio为输出。
-
语法
int gpio_direction_output(unsigned gpio, int value);
-
参数
参数名称 描述 gpio GPIO Index value 输出值 -
返回值
返回值 描述 0 成功 other 失败
5.5. 获取输入电平¶
-
目的
获取输入引脚的电平。
-
语法
int gpio_get_value(unsigned gpio);
-
参数
参数名称 描述 gpio GPIO Index -
返回值
返回值 描述 int 电平值
5.6. 设置输出电平¶
-
目的
设定输出引脚的电平。
-
语法
void gpio_set_value(unsigned gpio, int value);
-
参数
参数名称 描述 gpio GPIO Index value 输出值 -
返回值
返回值 描述 0 成功 other 失败
5.7. 设置引脚为GPIO MODE¶
-
目的
设置引脚为GPIO MODE。
-
语法
void sstar_gpio_pad_set(U8 gpio_index);
-
参数
参数名称 描述 gpio_index GPIO Index -
返回值
返回值 描述 void 无
5.8. 清除引脚为GPIO MODE¶
-
目的
清除引脚的GPIO MODE。
-
语法
void sstar_gpio_pad_clr(U8 gpio_index);
-
参数
参数名称 描述 gpio_index GPIO Index -
返回值
返回值 描述 void 无
5.9. 设置引脚的TMUX模式¶
-
目的
设置引脚的TMUX模式。
-
语法
U8 sstar_gpio_pad_val_set(U8 gpio_index, U32 pad_mode);
-
参数
参数名称 描述 gpio_index GPIO Index pad_mode TMUX MODE -
返回值
返回值 描述 1 输出参数错误 0 成功
5.10. 获取引脚的TMUX模式¶
-
目的
该API用于获取某只Pad当前配置的PadMode,前提是这只Pad配置PadMode的时候是通过Padmux接口进行配置,直接操作寄存器进行配置的方式则不会使该API生效。
-
语法
U8 sstar_gpio_pad_val_get(U8 gpio_index, U32* pad_mode);
-
参数
参数名称 描述 gpio_index Group Index pad_mode 获取到的TMUX MODE -
返回值
返回值 描述 1 输出参数错误 0 成功
5.11. 设置引脚的电压模式¶
-
目的
设置输入引脚的电压模式,注意本接口仅在Muffin支持。
-
语法
void sstar_gpio_vol_val_set(U8 group, U32 mode);
-
参数
参数名称 描述 group Group num (11 Groups in total) mode Mode = 0:引脚电压为3.3V; Mode = 1:引脚电压为1.8V -
返回值
返回值 描述 void 无
5.12. 获取引脚状态¶
-
目的
获取引脚的状态。
-
语法
U8 sstar_gpio_pad_in_out(U8 gpio_index, U8* pad_in_out);
-
参数
参数名称 描述 gpio_index GPIO Index pad_in_out 0表示引脚状态为输出,1表示引脚状态为输入 -
返回值
返回值 描述 1 输入参数错误 0 成功
5.13. 设置GPIO的上拉功能¶
-
目的
开启指定的GPIO上拉功能。
-
语法
U8 sstar_gpio_pull_up(U8 gpio_index);
-
参数
参数名称 描述 gpio_index GPIO Index -
返回值
返回值 描述 0 设置成功 other 该引脚不支持上拉设置或者输入参数错误
5.14. 设置GPIO的下拉功能¶
-
目的
开启指定的GPIO下拉功能。
-
语法
U8 sstar_gpio_pull_down(U8 gpio_index);
-
参数
参数名称 描述 gpio_index GPIO Index -
返回值
返回值 描述 0 设置成功 other 该引脚不支持下拉设置或者输入参数错误
5.15. 关闭GPIO的上/下拉功能¶
-
目的
关闭指定的GPIO上/下拉功能,并切换至悬空状态。
-
语法
U8 sstar_gpio_pull_off(U8 gpio_index);
-
参数
参数名称 描述 gpio_index GPIO Index -
返回值
返回值 描述 0 设置成功 other 该引脚不支持上拉设置或者输入参数错误
5.16. 获取GPIO的上/下拉状态¶
-
目的
获取指定的GPIO上/下拉状态。
-
语法
U8 sstar_gpio_pull_status(U8 gpio_index, U8* pull_status);
-
参数
参数名称 描述 gpio_index GPIO Index pull_status 获取到的上/下拉状态 -
返回值
返回值 描述 0 获取成功 1 该引脚不支持上拉设置或者输入参数错误
5.17. 设置GPIO的驱动能力¶
-
目的
设置指定的GPIO的驱动能力。
-
语法
U8 sstar_gpio_drv_set(U8 gpio_index, U8 level);
-
参数
参数名称 描述 gpio_index GPIO Index level 驱动能力等级 -
返回值
返回值 描述 0 设置成功 other 该引脚不支持驱动能力设置或者输入参数错误
5.18. 获取GPIO的驱动能力等级¶
-
目的
获取指定的GPIO的驱动能力等级。
-
语法
U8 sstar_gpio_drv_get(U8 gpio_index, U8* level);
-
参数
参数名称 描述 gpio_index GPIO Index level 获取到的GPIO的驱动能力等级 -
返回值
返回值 描述 0 获取成功 1 该引脚不支持驱动能力设置或者输入参数错误
5.19. 获取GPIO的中断号¶
-
目的
获取指定的GPIO的中断号。
-
语法
int sstar_gpio_to_irq(U8 gpio_index);
-
参数
参数名称 描述 gpio_index GPIO Index -
返回值
返回值 描述 virq Virq为返回的中断号 负数或0 失败
5.20. 获取GPIO Index¶
-
目的
通过GPIO Name获取GPIO Index。
-
语法
U8 sstar_gpio_name_to_num(U8* p_name, U8* gpio_index);
-
参数
参数名称 描述 p_name GPIO Name gpio_index 获取到的GPIO Index -
返回值
返回值 描述 1 输入参数错误 0 成功
5.21. 获取特定PadMode对应的PIN脚¶
-
目的
查询能够使用某一个特定PadMode的所有GPIO脚。
-
语法
U32* sstar_gpio_padmode_to_padindex(U32 mode);
-
参数
参数名称 描述 mode 所要查询的PadMode -
返回值
返回值 描述 数组首地址 存放GPIO Index的数组
5.22. 获取复用到的引脚¶
-
目的
以Puse为检索条件遍历,获取xxx-padmux.dtsi中配置到的Pad。
-
语法
int mdrv_padmux_getpad (int Puse);
-
参数
参数名称 描述 Puse Puse的宏定义 -
返回值
返回值 描述 PadId 成功获取到padmux.dtsi中的Pad的宏定义 PAD_UNKNOWN 输入的Puse有误或者padmux.dtsi中没有对应的PadId
5.23. 获取复用到的Tmux Mode¶
-
目的
以Puse为检索条件遍历,获取xxx-padmux.dtsi中配置到的Tmux Mode。
-
语法
int mdrv_padmux_getmode (int Puse);
-
参数
参数名称 描述 Puse Puse的宏定义 -
返回值
返回值 描述 PadId 成功获取到padmux.dtsi中的Mode的宏定义 PAD_UNKNOWN 输入的Puse有误或者padmux.dtsi中没有对应的PadId
5.24. 获取PUSE的宏定义¶
-
目的
因为PUSE的宏定义遵循一套规则:
-
不同IP之间的偏移为0x10000
-
同一个IP中不同Channel之间的偏移为0x100
-
同一个IP同一个Channel中不同Puse之间的偏移为0x1
因此可以根据这三个参数获取Puse的宏定义。
-
-
语法
int mdrv_padmux_getpuse (int IP_Index, int Channel_Index, int Pad_Index);
-
参数
参数名称 描述 IP_Index Puse所在的IP,可在mdrv_puse.h中查阅 Channel_Index Puse所在的Channel,可在mdrv_puse.h中查阅 Pad_Index Puse在channel中的Index,可在mdrv_puse.h中查阅 -
返回值
返回值 描述 Puse 成功获取到padmux.dtsi中的PadId