PWM使用参考
REVISION HISTORY¶
| Revision No. | Description |
Date |
|---|---|---|
| 1.0 | 08/23/2024 |
1. 概述¶
PWM (Pulse Width Modulation) 模块用于产生脉宽波形,可通过改变频率和占空比来改变输出的电流、电压进而实现控制电机转速、液晶屏调光等功能;SigmaStar的PWM模块同时具备Group功能(细分为sync 、round、hold、stop),即每4个channel的PWM可绑定成一组,实现4路PWM同步产生或停止。
2. 功能描述¶
-
支持PWM的channel数量为11个,支持加入各自的Group
-
支持的OSCCLK(Hz)为:86M、12M、6M、3M、1.5M、1M、32K、8K
-
频率的工作范围是(OSCCLK/2)到(OSCCLK/2^34) ,例如OSCCLK = 12MHz,则范围是(0.0007Hz~6MHz);
-
支持double buffer来防止产生错误波形,即波形更新会等待当前波形完全生成之后;
-
支持sync功能,即Group内的PWM在同一个时刻产生波形,一般一组Group中会包含4个channel的PWM
-
支持round功能,即同Group内的PWM会在产生特定数量的脉冲后停止
-
支持hold功能,即同Group内的PWM会在完成当前周期的波形后暂停,常用于改变波形的设定,可设定暂停时间内的高低电平
-
支持stop功能,即同Group内的PWM会紧急停止
3. 相关概念说明¶
3.1. 频率和占空比¶
-
频率(frequency)
每秒钟信号从高电平到低电平再回到高电平的次数。
-
占空比(duty cycle)
高电平持续时间和低电平持续时间之间的比例。
-
举例说明
假设PWM的OSCCLK频率为12M,那么可设置的频率范围为:0.0007Hz~6MHz;
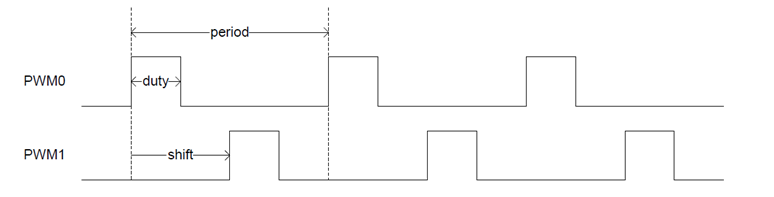
设定PWM0和PWM1为频率120Hz,占空比25%的波形,且PWM1相对于PWM0有180°的相位偏移,那么各参数配置如下:
period duty shift PWM0 120Hz 25% 0% PWM1 120Hz 75% 50% 产生的波形如下图:
3.2. 普通精度模式¶
rtos config中不开启CONFIG_SSTAR_PWM_EXTEND(Support high precision calculation),则使用普通精度模式,该模式下配置PWM的period的单位为Hz,duty cycle的单位为百分比。
假设要设置PWM0频率为10000HZ,占空比为50%,则:
period = 10000
duty cycle = 50
3.3. 高精度模式¶
rtos config中开启CONFIG_SSTAR_PWM_EXTEND(Support high precision calculation)选项时,则使用高精度模式,该模式下配置PWM的period和duty_cycle均使用纳秒为单位,所以要先计算周期和占空比的值。
假设要设置PWM0频率为10000.5HZ,占空比为49.5%,则:
period = 10^9 ÷ 10000.5 = 99995
duty cycle = 99995 * 49.5% = 49498
由此可见,高精度模式的优势在于参数设定支持到小数。
3.4. GROUP相关概念¶
3.4.1. Sync mode¶
sync mode可以将每个pwm channel加入到各自的Group群组中,完成同时对多个PWM进行控制的目的,一个Group有3~4个pwm channel,且Group与channlel对应关系如下:
| Group | Group Member |
|---|---|
| Group0 | PWM0、PWM1、PWM2、PWM3 |
| Group1 | PWM4、PWM5、PWM6、PWM7 |
| Group2 | PWM8、PWM9、PWM10 |
3.4.2. Hold mode¶
Group的Hold功能会在pwm完成当前周期的波形后停止,并触发中断,此时可以改变各channel波形的配置以保持同步,完成修改后会关闭hold 功能,pwm就会重新产生新的波形,每组group都有自己独立的hold功能。

3.4.3. Round mode¶
round功能会在同group内的所有channel完成一定数量的脉冲后停止,每组group都有自己独立的round功能。

3.4.4. Stop mode¶
stop功能可以让当前group中的PWM立即停止(不会等当前周期完成)并维持结束时的电平,每组group都有自己独立的stop功能。

注意:stop 时间不建议太长,尤其是pwm停止后维持的电平为高电平时。
4. RTOS用法介绍¶
4.1 DRIVER PATH¶
sc/driver/sysdriver/pwm/drv/pub/drv_pwm.h sc/driver/sysdriver/pwm/drv/src/drv_pwm.c sc/driver/sysdriver/pwm/drv/src/drv_pwm_test.c sc/driver/sysdriver/pwm/hal/chipname/src/hal_pwm.c sc/driver/sysdriver/pwm/hal/chipname/inc/hal_pwm.h sc/driver/sysdriver/pwm/hal/chipname/inc/hal_pwm_cfg.h
4.2 CONFIG配置¶
#make menuconfig
BSP Driver Options --->
[*] Support PWM driver
[*] Support high precision calculation
4.3 SYSDESC配置¶
chipname.sysi文件位于sc/driver/sysdriver/sysdesc/hal/chipname/pub, 下文以pwm0做举例,完整请见chipname.sysi
<pwm0>
[reg_u32_u16] 0x1F003400 0x37;
[group_u32] 0;
[interrupts_u32] INT_IRQ_PWM_INT_ALL;
[camclk_u16] CAMCLK_pm_pwm;
[clk_level_u8] 0;
[status_u8] 1;
pwm驱动中支持配置的属性如下表:
| 属性 | 描述 | 设定值 | 备注 |
|---|---|---|---|
| reg_u32_u16 | 指定bank的地址 | 不需要修改 | |
| camclk_u16 | 指定时钟源 | 不需要更改 | |
| interrupts_u32 | 指定硬件中断号 | 不需要更改 | |
| clk_level_u8 | 选择时钟挡位 | pwm010可选07分别对应12M/32K/1.5M/1M/8K/86M/6M/3M | 每个channel选择必须一致 |
| group_u32 | 选择是否加入group | 不配置该属性则不加入group,加入group配置0/½/3,详见Group与channlel对应关系 | 可根据需要修改 |
| status_u8 | 选择是否使能驱动 | 1表示enable;0表示disable | 可根据需要修改 |
4.4 PADMUX设定¶
在sc/driver/sysdriver/sysdesc/hal/chipname/pub/chipname-xxx.sys文件中的padmux节点配置引脚复用功能
<padmux>
[schematic_u32_u32_u32]
PAD_PWM0 PINMUX_FOR_PWM0_MODE_1 MDRV_PUSE_PWM0,
PAD_PWM1 PINMUX_FOR_PWM1_MODE_1 MDRV_PUSE_PWM1,
PAD_GPIO2 PINMUX_FOR_PWM2_MODE_4 MDRV_PUSE_PWM2,
PAD_GPIO3 PINMUX_FOR_PWM3_MODE_4 MDRV_PUSE_PWM3,
PAD_GPIO4 PINMUX_FOR_PWM4_MODE_3 MDRV_PUSE_PWM4,
PAD_GPIO5 PINMUX_FOR_PWM5_MODE_3 MDRV_PUSE_PWM5,
PAD_GPIO6 PINMUX_FOR_PWM6_MODE_3 MDRV_PUSE_PWM6,
PAD_GPIO7 PINMUX_FOR_PWM7_MODE_3 MDRV_PUSE_PWM7,
PAD_GPIO0 PINMUX_FOR_PWM8_MODE_1 MDRV_PUSE_PWM8,
PAD_GPIO14 PINMUX_FOR_PWM9_MODE_3 MDRV_PUSE_PWM9,
PAD_GPIO15 PINMUX_FOR_PWM10_MODE_3 MDRV_PUSE_PWM10>;
[status_u8] 1;
4.5 API说明¶
头文件位于sc/driver/sysdriver/pwm/drv/pub/drv_pwm.h
struct pwm_ch_cfg
{
u64 duty; //设定占空比,实际占空比=duty-shift
u64 shift; //设定起始相位
u64 period; //设定周期
u32 polarity; //极性设置:0-正常,1-极性取反
u32 channel; //指定channel
};
struct pwm_gp_cfg
{
u64 duty;
u64 shift;
u8 polar;
u32 group;
u64 period;
};
extern int drv_pwm_set_period(u32 channel, u64 period, u8 sync);
extern int drv_pwm_set_duty(u32 channel, u64 duty, u8 sync);
extern int drv_pwm_set_shift(u32 channel, u64 shift, u8 sync);
extern int drv_pwm_set_polarity(u32 channel, u64 polar, u8 sync);
extern int drv_pwm_set_chan_config(struct pwm_ch_cfg * pwm_ch);
extern int drv_pwm_get_chan_config(struct pwm_ch_cfg * pwm_ch);
extern int drv_pwm_channel_enable(u32 channel, u8 enable);
extern int drv_pwm_set_group_config(struct pwm_gp_cfg *pwm_gp);
extern int drv_pwm_get_group_config(struct pwm_gp_cfg *pwm_gp);
extern int drv_pwm_group_enable(u32 group, u8 enable);
extern int drv_pwm_stop_enable(u32 group, u8 stop_en);
extern int drv_pwm_update_enable(u32 grou);
extern int drv_pwm_round_enable(u32 group, u32 round_num);
4.5.1. drv_pwm_set_period¶
-
目的
设置pwm周期
-
语法
int drv_pwm_set_period(u32 channel, u64 period, u8 sync)
-
参数
参数名称 描述 channel 选择pwm的通道 period pwm周期,高精度模式以ns为单位,低精度模式以Hz为单位 sync 0表示配置在此次接口调用后生效,1表示此次接口调用后不生效,生效需要调用drv_pwm_update_enable接口 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.2. drv_pwm_set_duty¶
-
目的
设置pwm占空比
-
语法
drv_pwm_set_duty(u32 channel, u64 duty, u8 sync)
-
参数
参数名称 描述 channel 选择pwm的通道 duty pwm占空比,高精度模式以ns为单位,低精度模式以Hz为单位 sync 0表示配置在此次接口调用后生效,1表示此次接口调用后不生效,生效需要调用drv_pwm_update_enable接口 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.3. drv_pwm_set_shift¶
-
目的
设置pwm相位偏移
-
语法
int drv_pwm_set_shift(u32 channel, u64 shift, u8 sync)
-
参数
参数名称 描述 channel 选择pwm的通道 shift pwm相位偏移,高精度模式以ns为单位,低精度模式以Hz为单位 sync 0表示配置在此次接口调用后生效,1表示此次接口调用后不生效,生效需要调用drv_pwm_update_enable接口 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.4. drv_pwm_set_polarity¶
-
目的
设置pwm极性
-
语法
int drv_pwm_set_polarity(u32 channel, u64 polar, u8 sync)
-
参数
参数名称 描述 channel 选择pwm的通道 polar pwm极性,0:normal,1:invert sync 0表示配置在此次接口调用后生效,1表示此次接口调用后不生效,生效需要调用drv_pwm_update_enable接口 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.5. drv_pwm_set_chan_config¶
-
目的
配置pwm指定通道的属性
-
语法
int drv_pwm_set_chan_config(struct pwm_ch_cfg * pwm_ch)
-
参数
参数名称 描述 pwm_ch 用于配置pwm的通道、周期、占空比、相位偏移和极性信息 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.6. drv_pwm_get_chan_config¶
-
目的
获取当前pwm通道的属性
-
语法
int drv_pwm_get_chan_config(struct pwm_ch_cfg * pwm_ch)
-
参数
参数名称 描述 pwm_ch 用于获取pwm的通道、周期、占空比、相位偏移和极性信息 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.7. drv_pwm_channel_enable¶
-
目的
使能pwm配置
-
语法
int drv_pwm_channel_enable(u32 channel, u8 enable)
-
参数
参数名称 描述 channel 选择pwm的通道 enable 1:enable,0:disable -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.8. drv_pwm_set_group_config¶
-
目的
配置group属性
-
语法
int drv_pwm_set_group_config(struct pwm_gp_cfg *pwm_gp)
-
参数
参数名称 描述 pwm_gp 用于配置pwm group的通道、周期、占空比、相位偏移和极性信息,生效需要调用drv_pwm_update_enable接口 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.9. drv_pwm_get_group_config¶
-
目的
获取当前group的属性配置
-
语法
int drv_pwm_get_group_config(struct pwm_gp_cfg *pwm_gp)
-
参数
参数名称 描述 pwm_gp 用于获取pwm group的通道、周期、占空比、相位偏移和极性信息 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.10. drv_pwm_group_enable¶
-
目的
使能pwm group功能
-
语法
int drv_pwm_group_enable(u32 group, u8 enable)
-
参数
参数名称 描述 group 选择要使能pwm波形的group enable 1:enable,0:disable -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.11. drv_pwm_stop_enable¶
-
目的
使能stop功能
-
语法
int drv_pwm_stop_enable(u32 group, u8 stop_en)
-
参数
参数名称 描述 group 选择要使能停止功能的group stop_en 1:enable,波形停止;0:disable,波形恢复 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.12. drv_pwm_round_enable¶
-
目的
设置round mode的脉冲数量
-
语法
int drv_pwm_round_enable(u32 group, u32 round_num)
-
参数
参数名称 描述 group 选择使能round mode的group round_num 指定输出PWM波形的周期数 -
返回值
结果 描述 成功 返回0 失败 返回负数
4.5.13. drv_pwm_update_enable¶
-
目的
更新pwm配置
-
语法
int drv_pwm_update_enable(u32 group)
-
参数
参数名称 描述 group 选择要进行参数更新的group -
返回值
结果 描述 成功 返回0 失败 返回负数
4.6 DEMO¶
demo源码位于sc/driver/sysdriver/pwm/drv/src/drv_pwm_test.c
5. DEBUG方法¶
5.1 PWM各接口不存在¶
-
检查SYS PWM节点的
status是否为1 -
检查kernel config是否配置,详见4.3. SYSDESC配置
5.2 配置后PWM无波形产生¶
Step1: 首先确认测量的引脚是否正确:打开对应的原理图确认即可,如果没有错误的话,则进行下一步。
Step2: 确认对应的PWM mode是否生效,引脚复用失败主要有两个原因:
原因一:该引脚没有设置为PWM mode,设置方法详见4.4 PADMUX配置
原因二:有优先级比PWM mode更高级别的padmux mode被开启
Step3:检查pwm相关参数是否设置成功